Before we continue, we need to create the wiring cables that we will need. We do this now so we can attach the cables as we assemble the robot so we don’t have to disassemble parts later to get to the components.
Creating these cables requires crimping a number of connections. If you are unfamiliar with how to do this you can find some crimping tips here.
Absolute Analog Encoders
We will need four cables to connect the Absolute Analog Encoder for measuring the Swerve Module angle. Each of the cables should be wired as shown:
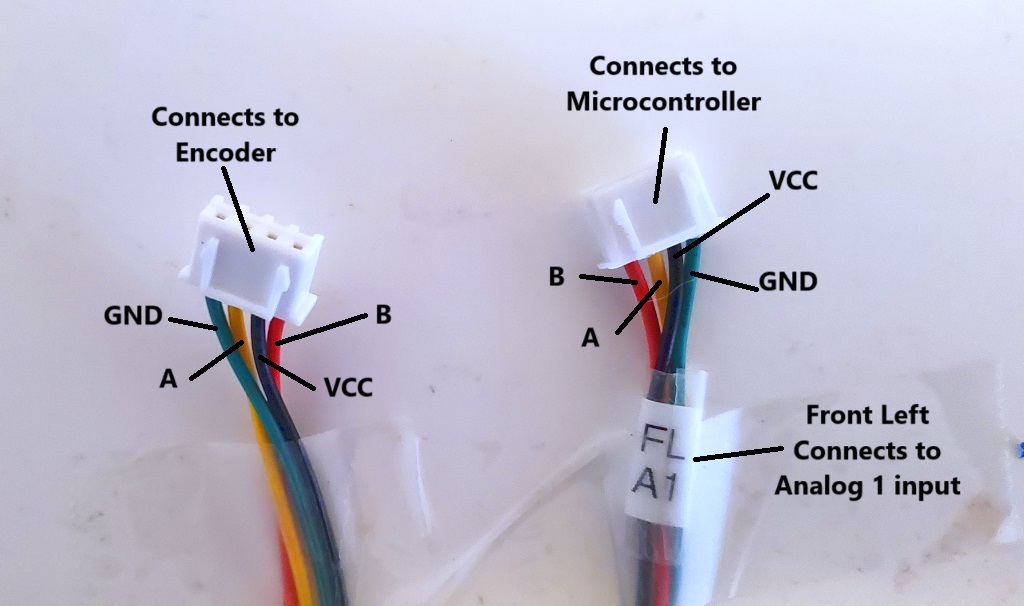
Pay close attention to the order of the wires for each connector. Also be sure to label the end of the cable that connects to the Microcontroller as follows:
- Front Left connects to the #1 Analog input of the Microcontroller (FL A1)
- Back Left connects to the #2 Analog input of the Microcontroller (BL A2)
- Back Right connects to the #4 Analog input of the Microcontroller (BR A4)
- Front Right connects to the #3 Analog input of the Microcontroller (FR A3)
Quadrature Encoders
You will need four cables to connect to the Drive motors and a single cable to connect to the Feeder motor. There are two possible motors that you may be using for the Drive/Feeder motors and they have different wiring.
The first is the kind that you can obtain from us and is pictured in the following wiring diagram:
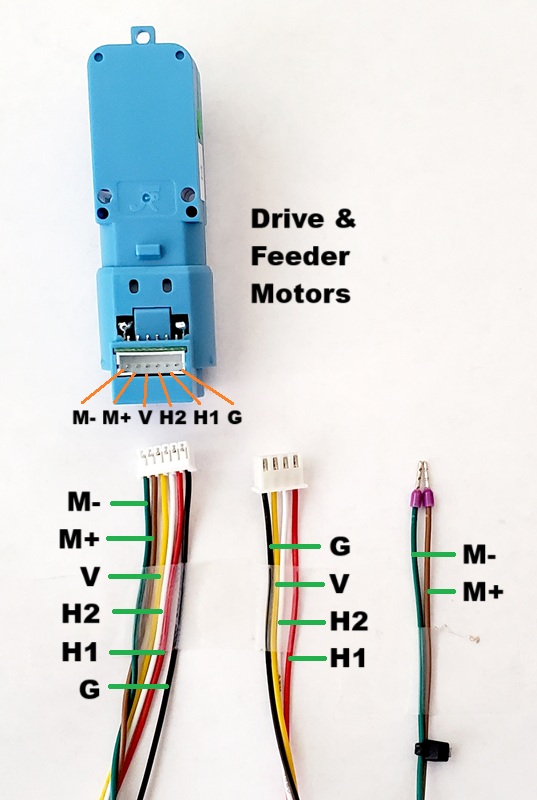
Pay close attention to the order of the wiring.
The second type of motor is one that you can usually get from Aliexpress and is shown and wired as follows:
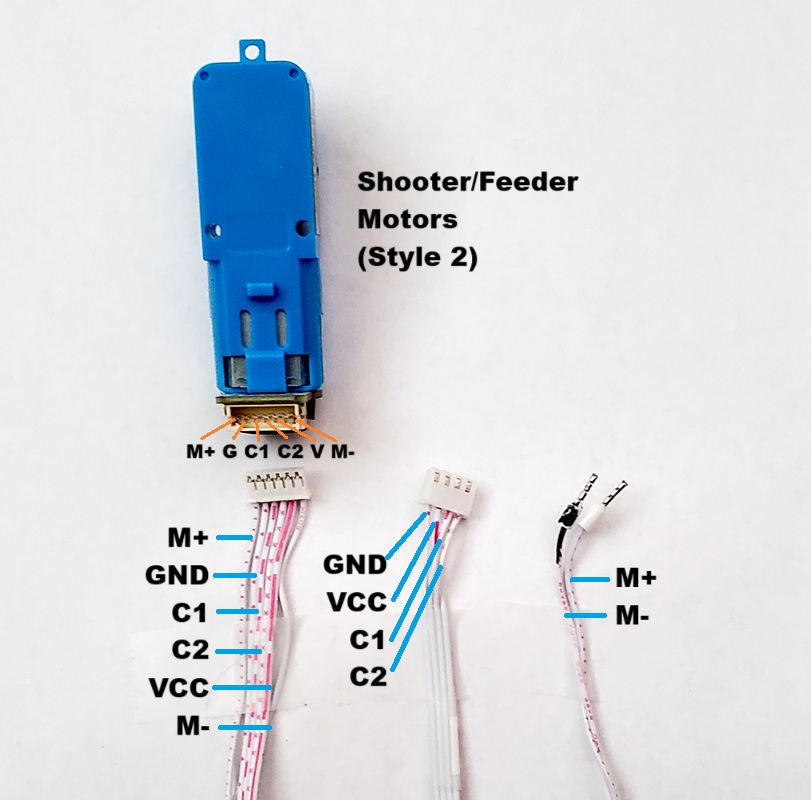
Once again, pay close attention to the order of the wires.
Now label each of the five cables as follows:
- Front Left connects to the #4 Quadrature input of the Microcontroller (FL Q4)
- Back Left connects to the #2 Quadrature input of the Microcontroller (BL Q3)
- Back Right connects to the #1 Quadrature input of the Microcontroller (BR Q1)
- Front Right connects to the #2 Quadrature input of the Microcontroller (FR Q2)
- Feeder connects to the #6 Quadrature input of the Main Microcontroller (FDR Q6)
The cable for the Quadrature Encoder for the Shooter Motor should be wired as shown:
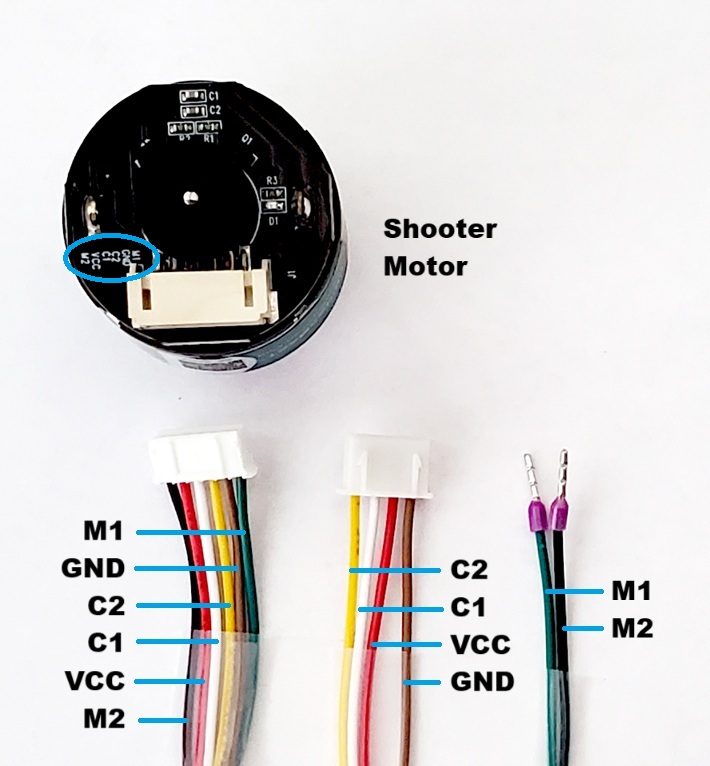
Once again pay close attention to the order of the wires. This cable should be labeled STR/Q5 for the Shooter and connects to the #5 Quadrature input on the Microcontroller.
Motor Controller
You will need four Motor Controller Cables to connect the Motor Controller to the Microcontroller should be 30 cm long and wired as shown below:
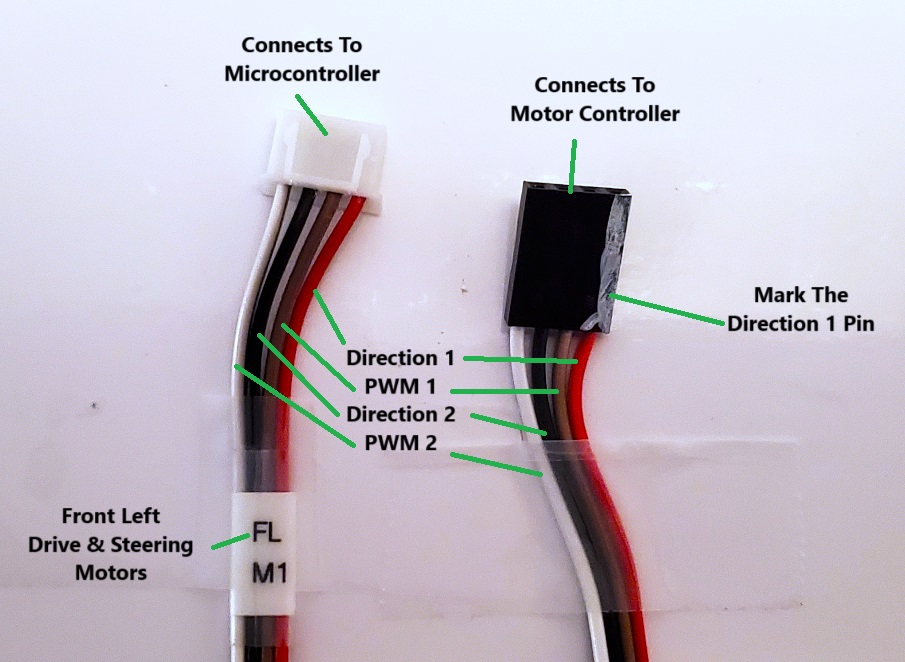
Note that in this case the cables just make a 1 to 1 connection. Don’t forget to label the cable. Also since the Motor Controller connector is not keyed you should mark the Direction 1 edge so you can orient it properly when plugging it into the Microcontroller board.
In addition to the control cable for the Motor Controller we will need a power cable. We will need five of these cables, one 11″ long and four 13″ long. On one end you should crip the power connectors to either end as shown below:

We will not be connecting anything to the other end of these cables at this time.
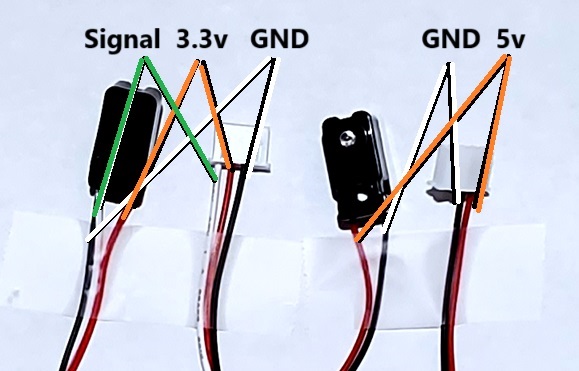
Gyro
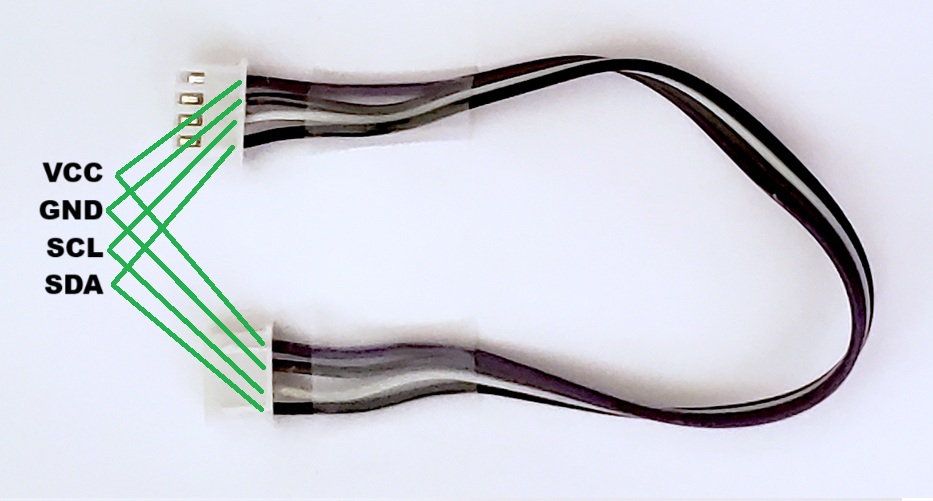
Prepare a 20 cm cable for the connection for the Microcontroller to the Gyro as follows:
Beam Break Sensor
Wire the Beam Break Sensor as shown: