Parts
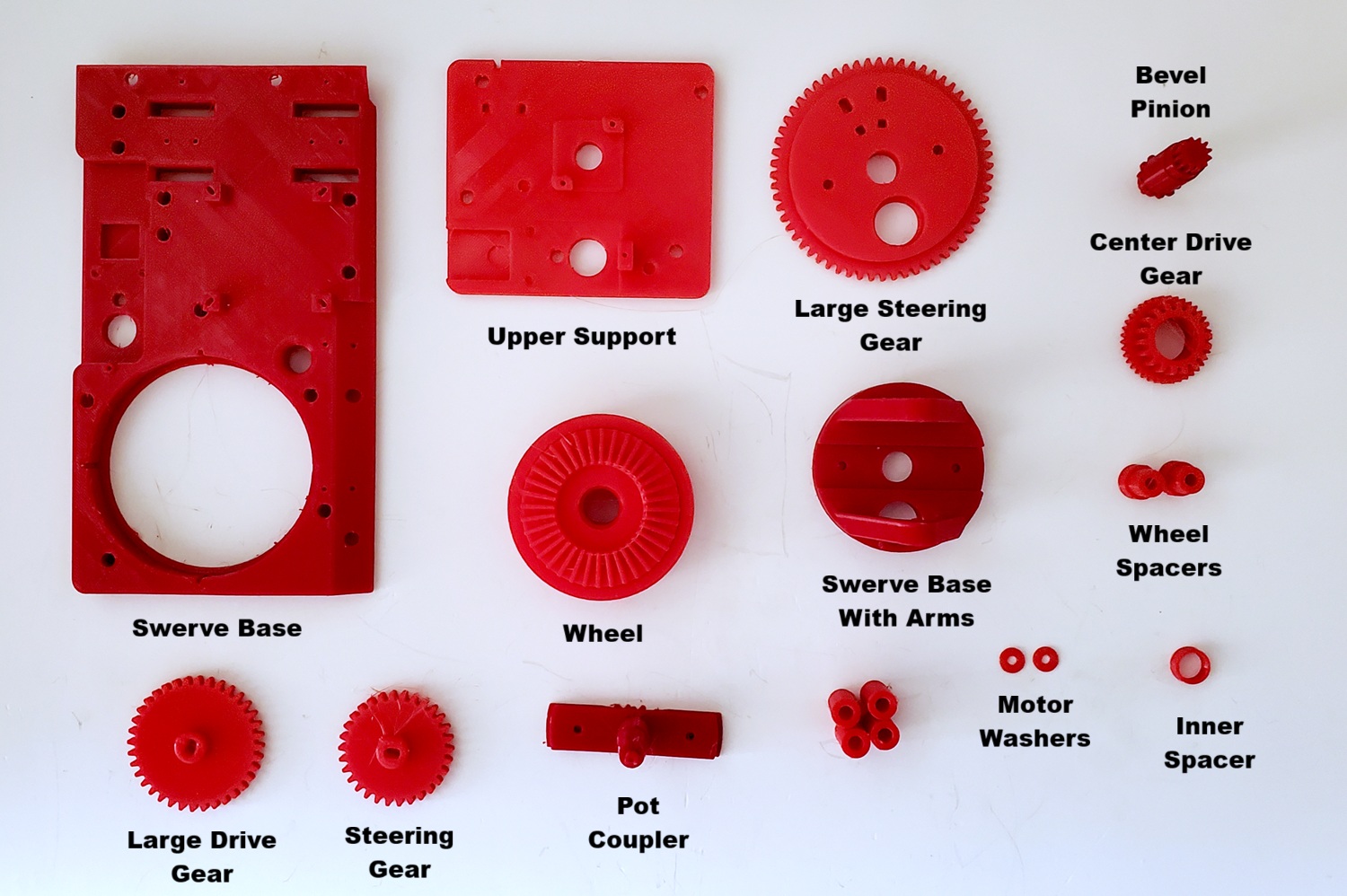
The robot consists of four swerve modules. To assemble each module you will need the following 3D printed parts:
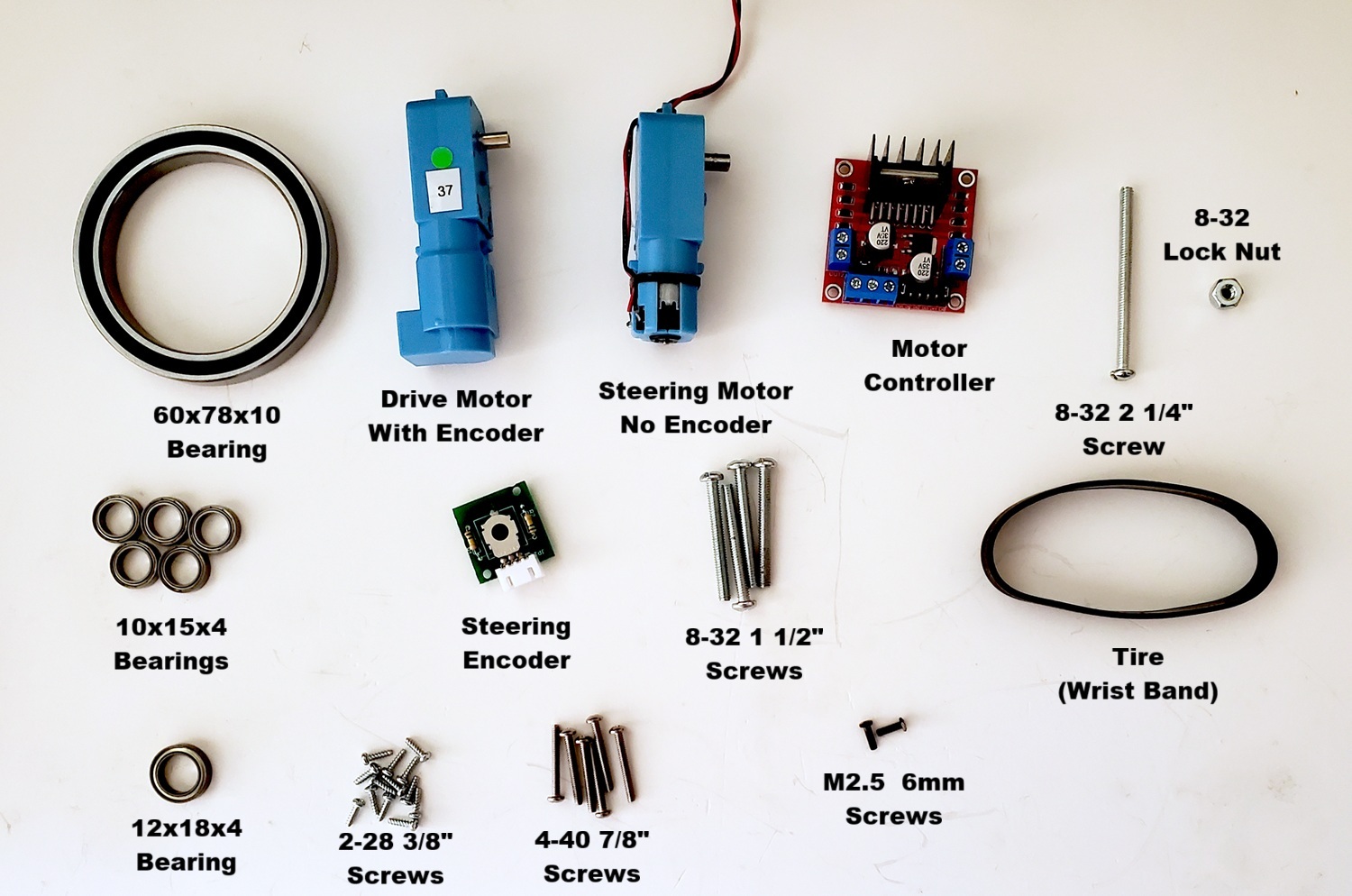
And the following set of hardware:
Applying the inserts
If you chose to print the parts that required inserts, you will need to insert them now. You can find directions on how to do that here.
Assemble the wheel
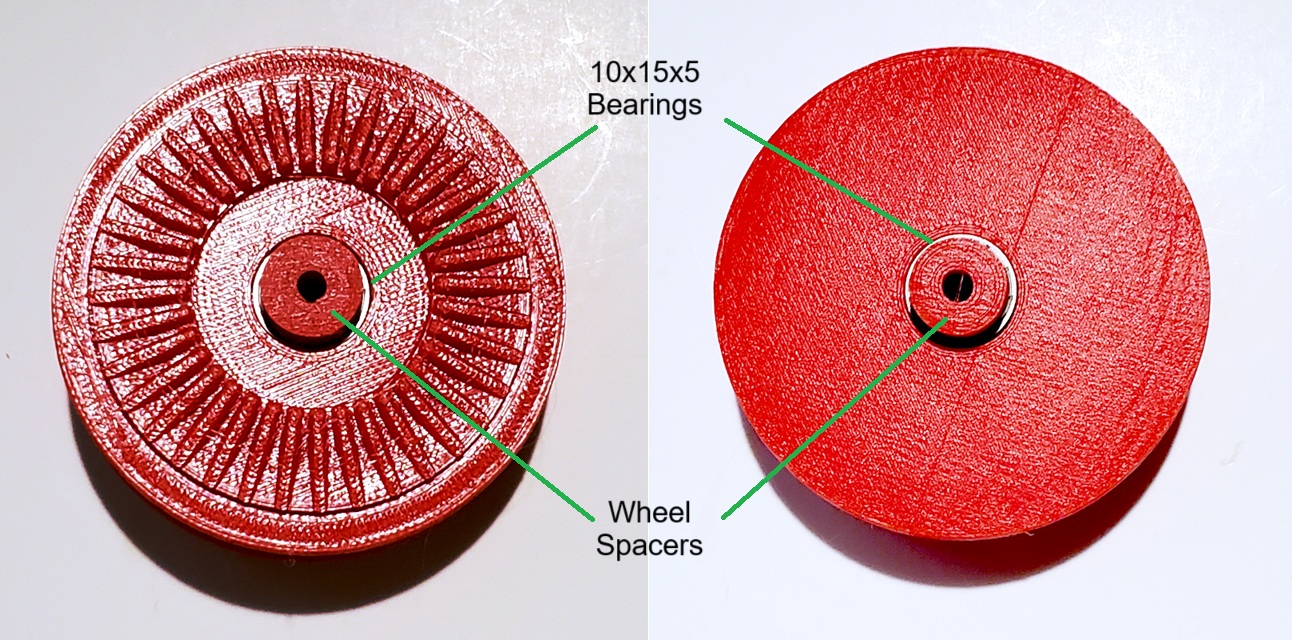
Insert a 10x15x4 Bearing and the Wheel Spacers into each side of the wheel as shown:
Then place the rubber Wrist Band around the wheel for traction as shown:

Assemble the Base
First insert the 60x78x10 Bearing into the Base and fasten with four 2-28 Screws as shown:

Then attach the Steering Motor (the one without the encoder) using two 4-40 Screws.

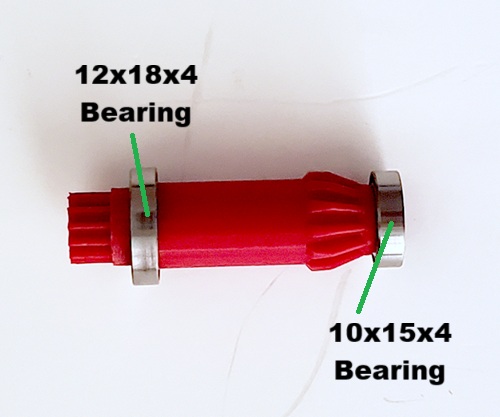
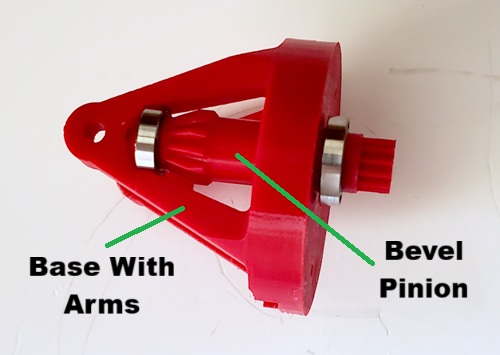
Next, attach the 10x15x5 and 12x18x4 Bearings onto the Bevel Pinion as shown:
Then insert this Bevel Pinion into the Base With Arms as shown:
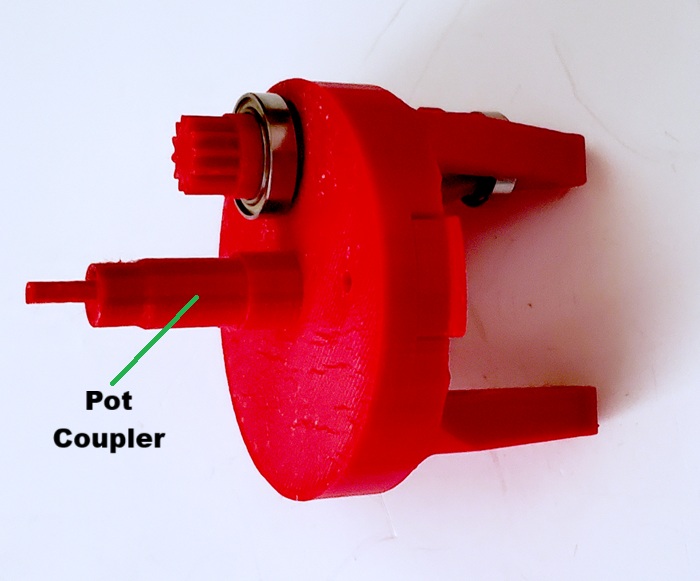
Finally, insert the Pot Coupler into the Base With Arms as shown:
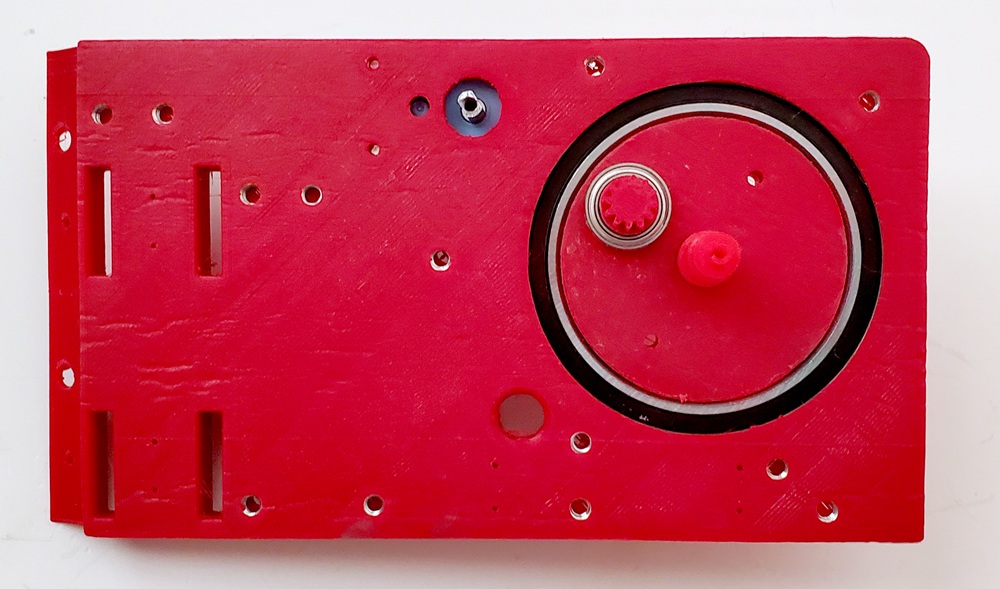
Now insert this assembly into the base as shown:
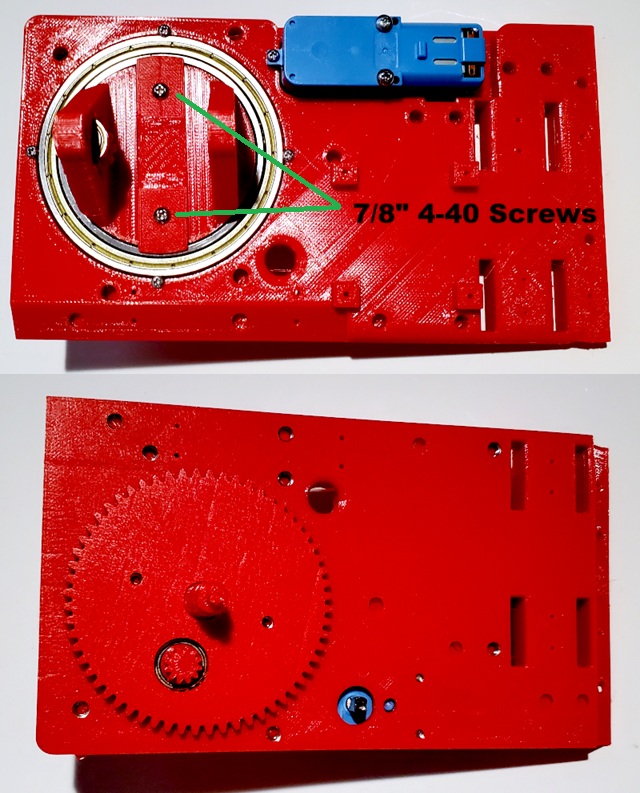
Now attach the Large Steering Gear to the Base With Arms with two 7/8″ 4-40 Screws as shown:
Then place two 10x15x4 Bearings on the Pot Coupler and lock them in place with the Inner Race Spacer as shown:
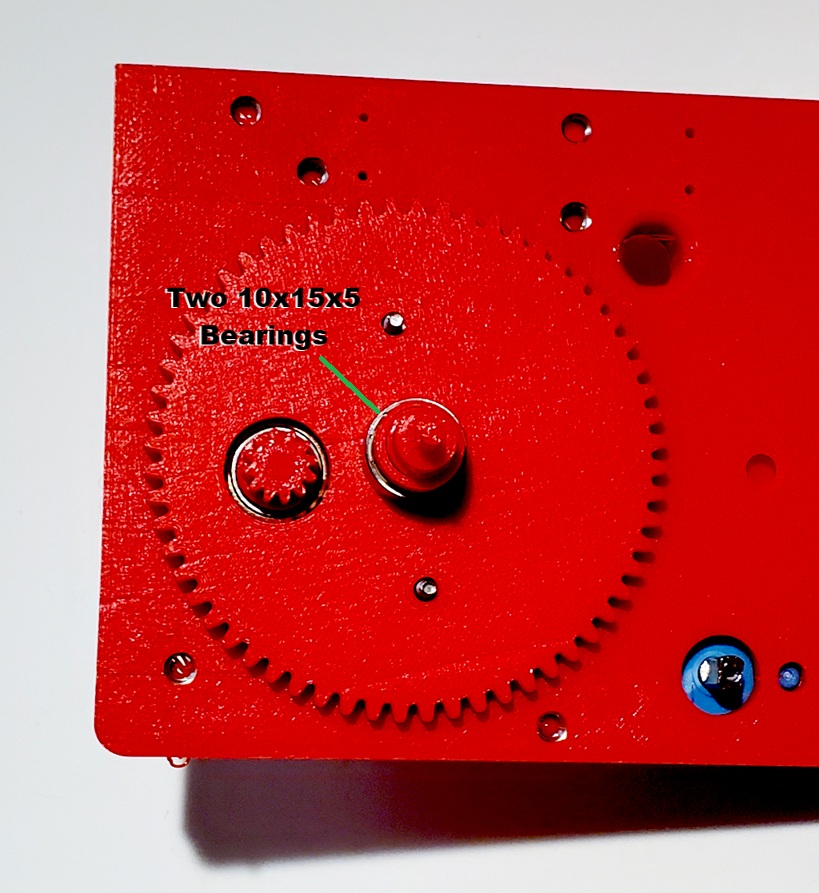
Now slide the Center Drive Gear over the two bearings that you just installed as shown:

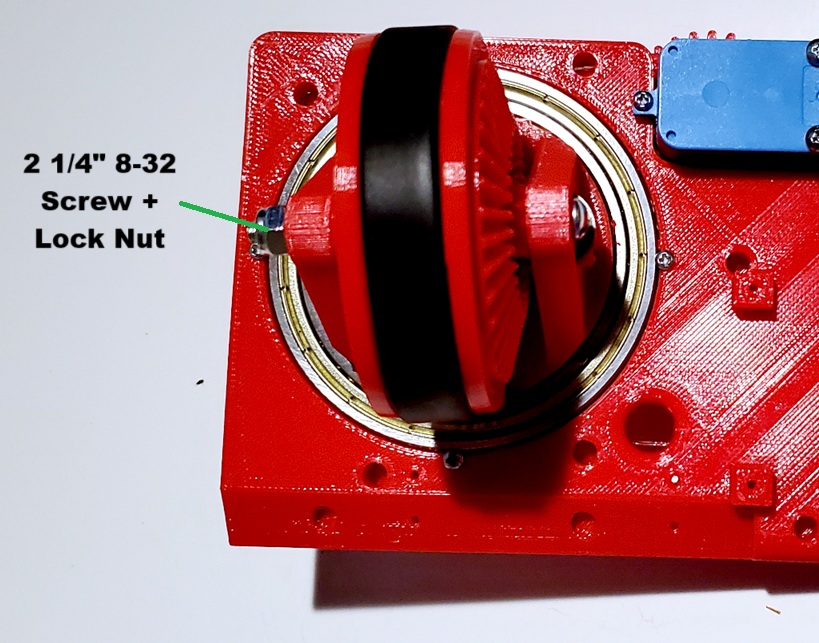
Next, attach the Wheel to the Base With Arms with the 2 1/4″ 8-32 Screw and Lock Nut as shown:
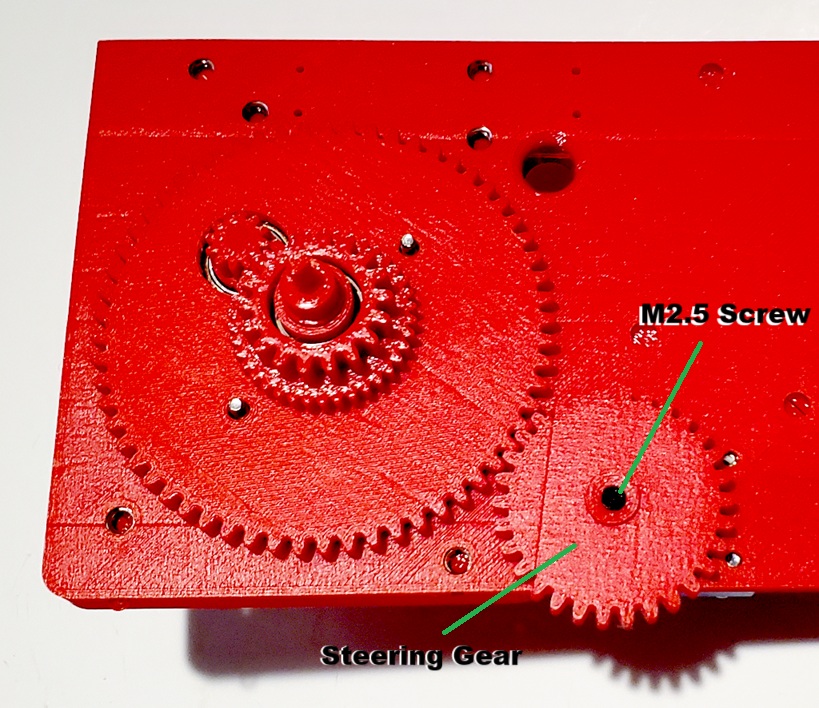
Finally, attach the Steering Gear to the Steering Motor using the washer and M2.5 Screw as shown:
Before you move on, you should apply a generous amount of your favorite gear lubricant to the gears. I have been using generic petroleum jelly for my lubricant and it seems to work well. Your milage might vary.
Assemble Upper Support
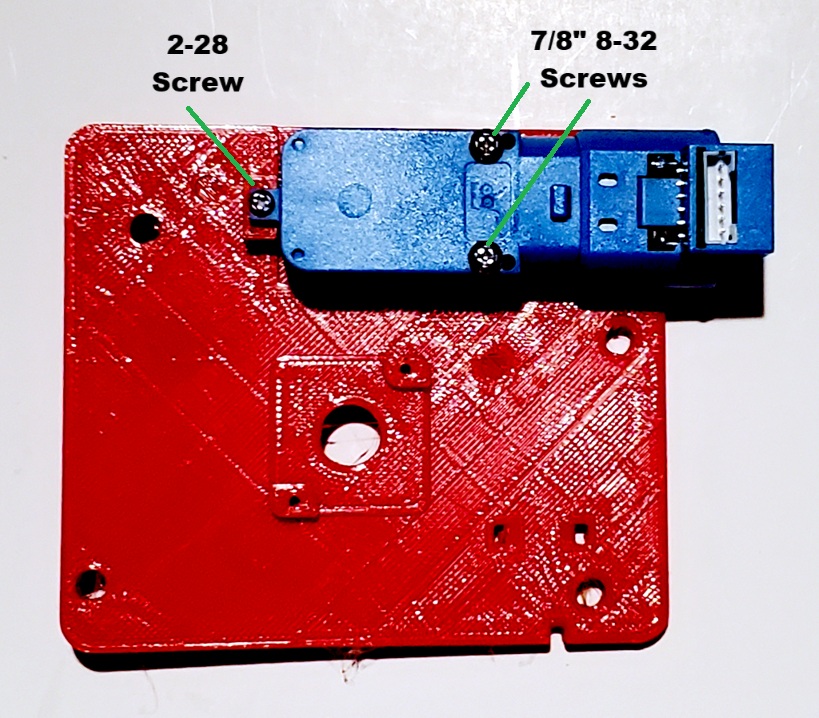
First attach the Drive Motor (the motor with the encoder) to the Upper Support with two 7/8″ 8-32 Screws and one 3/8″ 2-28 Screw as shown:
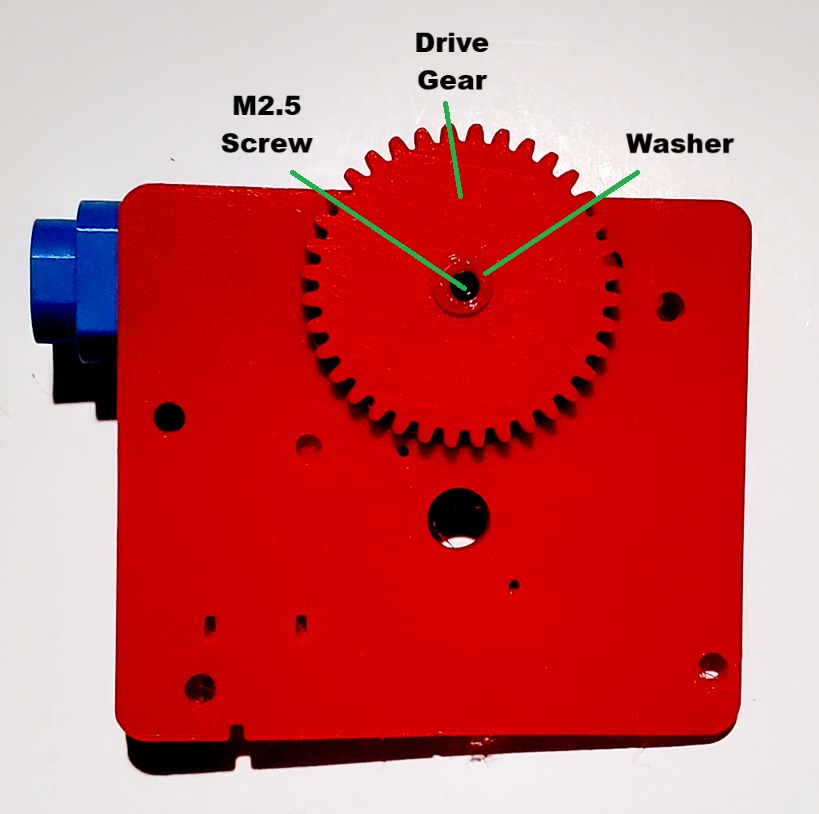
Then attach the Drive Gear with the Washer and a 2.5m Screw as shown. Once again apply a liberal amount of gear lubricant to the gear.
Next attach the Upper Support to the Base using the four Upper Support Spacers and four 1 1/2″ 8-32 Screws as shown:

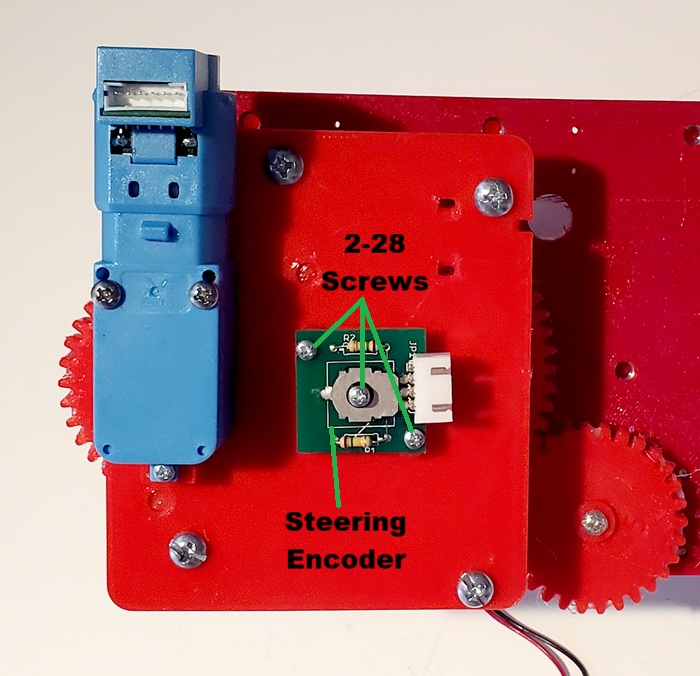
Next attach the Steering Encoder with three 2-28 Screws as shown:
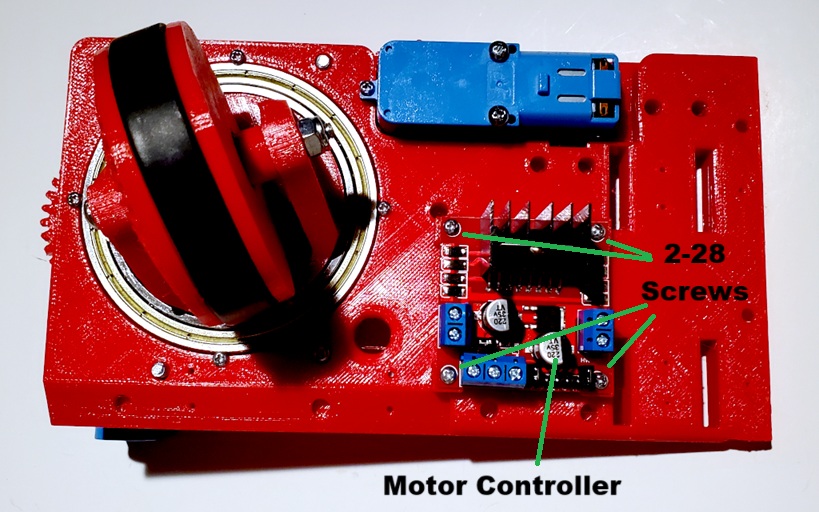
Then attach the Motor Controller to the Base using four 2-28 Screws as shown:
Swerve Module Wiring
Finally connect the Swerve Module Wiring as shown below. Pay close attention to the polarity of the wiring.
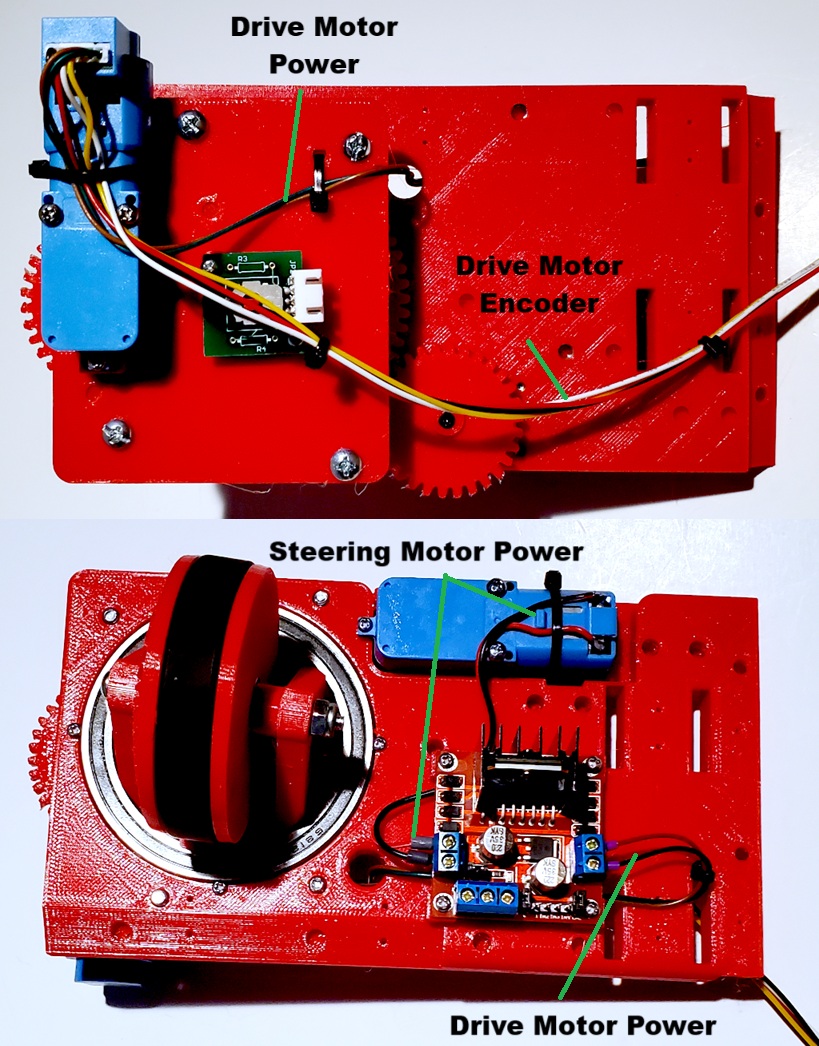
The Swerve Module is now complete. You will need to assemble four of these.