This page is currently a work in progress. For more information on how to get involved with the SwerveBot project contact me at programming@gabysoft.com.
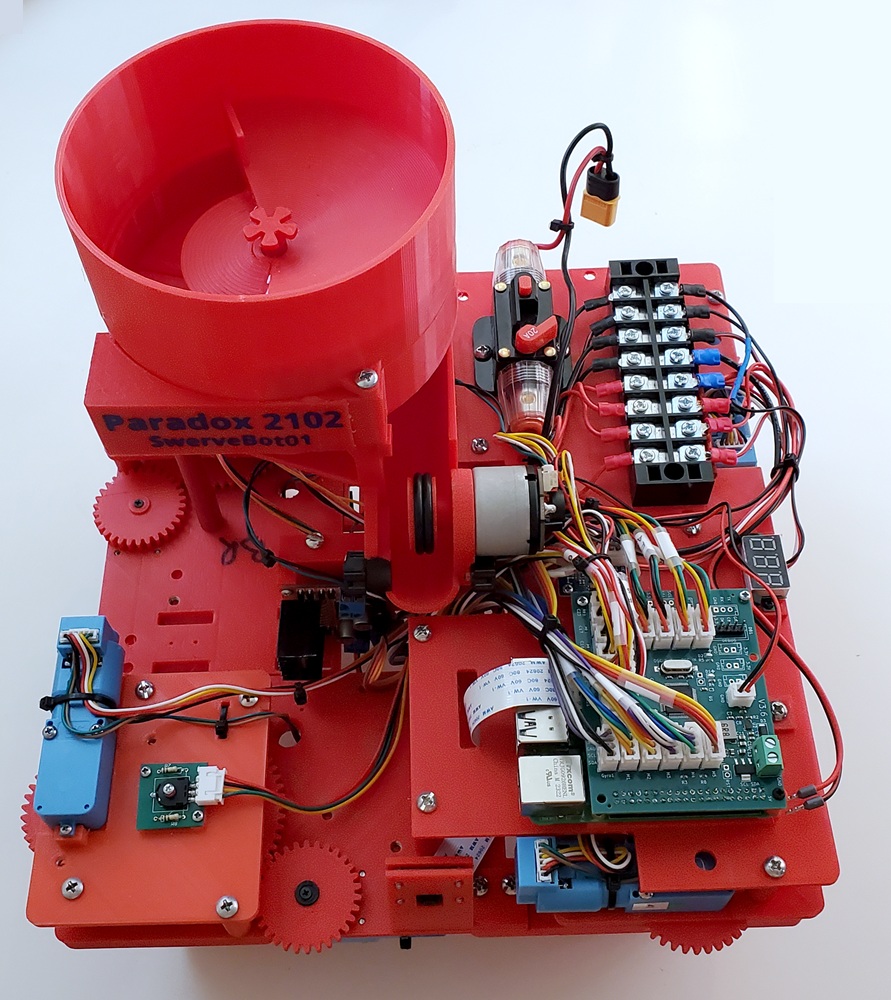
The SwerveBot is a robot which has a nerf ball shooter mounted swerve drive chassis. This is the robot that is used in the SwerveBot tutorial. Most of the parts are 3D printed and the following chapters describe it’s construction and wiring. A complete BOM for the non-3D printed parts, including where they can be sourced, can be found here.
To help facilitate others who wish to build these robots, I have put together a limited number of parts kits which consist of all the parts needed to build the SwerveBot except for the Raspberry Pi and battery. In addition, due to the difficulty of printing the precise parts needed for the swerve modules I have a very limited number of pre-printed and tested serve modules available. For more information contact me at programming@gabysoft.com.